


产品概述
| 价格区间 | 面议 | 产地类别 | 国产 |
|---|---|---|---|
| 应用领域 | 环保,能源,交通,综合 |
激光雷达走航车是一种用于进行地形测绘和三维扫描的车辆。它配备了激光雷达传感器,可以通过发射脉冲激光束来获取周围环境的高精度距离和位置信息,并将数据转换为点云图像。这些点云数据可以用于制作高精度数字地图、建筑物模型以及其他各种应用。通常用于城市规划、土地勘测、自动驾驶、智能交通等领域。
其原理是用激光器作为发射光源,向大气中发射激光束,并接收大气分子或大气中的气溶胶散射回波信号,继而采用光电探测技术手段进行大气分子或大气气溶胶的空间分布的主动遥感设备。
激光雷达走航车技术参数:
| 激光源 | 二极管LD泵浦全固态Nd:YAG调Q激光器(DPSSL) |
| 波长 | 532nm |
| 单脉冲能量 | 25μJ |
| 脉冲宽度 | 7~9ns |
| 重复频率 | 1KHZ〜4KHZ,多档位可以配置 |
| 望远镜口径 | 165mm |
| 望远镜视场角 | 250微弧度 |
| 望远镜采用封闭式光路 设计和安全防护设计 | 能够有效抑制灰尘累积、降低光损耗、提高光学 系统使用寿命 |
| 测量范围 | 75米到25公里(天气状况理想) |
| 有效探测高度 | 光学厚度0.5时,白天≥6km,夜间≥15km; |
| 探测盲区 | 75m |
| 探测器类型 | 单光子计数光电倍增管 |
| 数据采集最大计数 | 2^32 |
| 数据采集内存长度 | 4096 |
| 数据采集计数率 | 150MHZ |
| 时间分辨率 | 1到500秒(可任意设置) |
| 数据采集空间分辨率 | 7.5m/15m/30m等 |
| 仪器运行 | 全天候7*24小时无人值守观测 |
| 设备软件 | 数据采集、控制及分析等 |
| 开机稳定运行 | 10min |
| 环境温度 | -50℃〜55℃ |
| 环境湿度 | 10-95% |
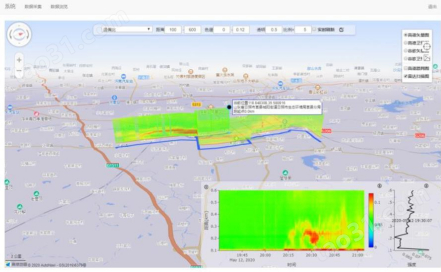
激光雷达走航车扫描数据分析
- 上一个: SD-D06机动车尾气标准发生与检定装置
- 下一个: SD-3001热电偶群炉自动检定系统